"""Demonstrates running Ptera Software's
AeroelasticUnsteadyRingVortexLatticeMethodSolver with an airplane whose wings mix
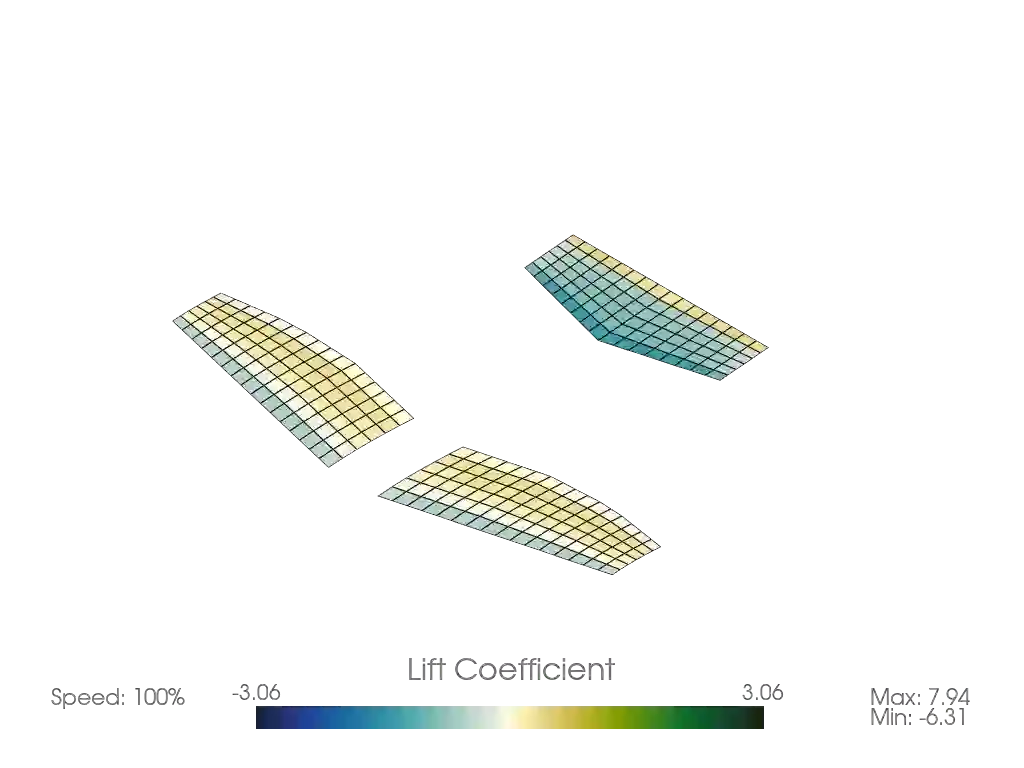
aeroelastic deformation and prescribed rigid motion.
The main wing deforms under its own aerodynamic loads using an AeroelasticWingMovement,
while its reflected counterpart and the V-tail follow prescribed motion rigidly using
standard WingMovements. This demonstrates that the solver applies first-order
deformation per wing, driven by each wing's own loads, rather than to every wing on the
airplane.
"""
import pterasoftware as ps
# Initialize the WingCrossSection parameters. Define the offsets for the spacing.
num_spanwise_panels = 2
Lp_Wcsp_Lpp_Offsets = (0.1, 0.5, 0.0)
cross_section_chords = [1.75, 1.75, 1.75, 1.75, 1.65, 1.55, 1.4, 1.2, 1.0]
wing_cross_sections = []
# Define WingCrossSections with a variable set of chords. All WingCrossSections for the
# deformation simulation have num_spanwise_panels = 2 (except the wing tip, which is
# always None). This is because each strip of WingCrossSection deforms independently as
# a torsional spring, and that model only works well if the strips are thin. To go
# thinner for the same base definition, increase the number of spanwise panels and set
# the explode_into_strips parameter to True on the Wing, which splits it back into
# single strips for deformation.
for i in range(len(cross_section_chords)):
wing_cross_sections.append(
ps.geometry.wing_cross_section.WingCrossSection(
num_spanwise_panels=(
num_spanwise_panels if i < len(cross_section_chords) - 1 else None
),
chord=cross_section_chords[i],
Lp_Wcsp_Lpp=Lp_Wcsp_Lpp_Offsets if i > 0 else (0.0, 0.0, 0.0),
angles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
control_surface_symmetry_type="symmetric",
control_surface_hinge_point=0.75,
control_surface_deflection=0.0,
spanwise_spacing="uniform" if i < len(cross_section_chords) - 1 else None,
airfoil=ps.geometry.airfoil.Airfoil(
name="naca2412",
outline_A_Lp=None,
resample=True,
n_points_per_side=400,
),
)
)
# Define the primary Wing. Note that the explode_into_strips parameter is set to True,
# which means that the Wing will be split into strips for deformation, and each strip
# will be modeled as a torsional spring.
wing_1 = ps.geometry.wing.Wing(
wing_cross_sections=wing_cross_sections,
name="Main Wing",
Ler_Gs_Cgs=(0.0, 0.5, 0.0),
angles_Gs_to_Wn_ixyz=(0.0, 0.0, 0.0),
symmetric=True,
mirror_only=False,
symmetryNormal_G=(0.0, 1.0, 0.0),
symmetryPoint_G_Cg=(0.0, 0.0, 0.0),
explode_into_strips=True,
num_chordwise_panels=6,
chordwise_spacing="uniform",
)
# Actually generate the Airplane. The V-tail is added as a second lifting surface but is
# not split into deformation strips, because it follows prescribed rigid motion rather
# than deforming. The solver deforms each Wing from its own aerodynamic loads, but only
# Wings backed by an AeroelasticWingMovement. Wings backed by a standard WingMovement
# stay rigid. Leaving the tail rigid also keeps its movement definition simpler, since
# it then needs no per-strip WingCrossSections.
example_airplane = ps.geometry.airplane.Airplane(
wings=[
wing_1,
ps.geometry.wing.Wing(
wing_cross_sections=[
ps.geometry.wing_cross_section.WingCrossSection(
num_spanwise_panels=8,
chord=1.5,
Lp_Wcsp_Lpp=(0.0, 0.0, 0.0),
angles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
control_surface_symmetry_type="symmetric",
control_surface_hinge_point=0.75,
control_surface_deflection=0.0,
spanwise_spacing="uniform",
airfoil=ps.geometry.airfoil.Airfoil(
name="naca0012",
outline_A_Lp=None,
resample=True,
n_points_per_side=400,
),
),
ps.geometry.wing_cross_section.WingCrossSection(
num_spanwise_panels=None,
chord=1.0,
Lp_Wcsp_Lpp=(0.5, 2.0, 0.0),
angles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
control_surface_symmetry_type="symmetric",
control_surface_hinge_point=0.75,
control_surface_deflection=0.0,
spanwise_spacing=None,
airfoil=ps.geometry.airfoil.Airfoil(
name="naca0012",
outline_A_Lp=None,
resample=True,
n_points_per_side=400,
),
),
],
name="V-Tail",
Ler_Gs_Cgs=(5.0, 0.0, 0.0),
angles_Gs_to_Wn_ixyz=(0.0, -5.0, 0.0),
symmetric=True,
mirror_only=False,
symmetryNormal_G=(0.0, 1.0, 0.0),
symmetryPoint_G_Cg=(0.0, 0.0, 0.0),
explode_into_strips=False,
num_chordwise_panels=6,
chordwise_spacing="uniform",
),
],
name="Example Airplane",
Cg_GP1_CgP1=(0.0, 0.0, 0.0),
weight=0.0,
c_ref=None,
b_ref=None,
)
# The main Wing was defined to have symmetric=True, mirror_only=False, and with a
# symmetry plane offset non-coincident with the Wing's axes yz plane. Therefore, that
# Wing had type 5 symmetry (see the Wing class documentation for more details on
# symmetry types). Therefore, it was actually split into two Wings, with the second Wing
# being a reflected version of the first. Therefore, we need to define a WingMovement
# for this reflected Wing. To start, we'll first define the reflected main wing's root
# and tip WingCrossSections' WingCrossSectionMovements.
# Define the WingCrossSectionMovement parameters.
dephase_x = 0.0
period_x = 0.0
amplitude_x = 0.0
dephase_y = 0.0
period_y = 0.0
amplitude_y = 0.0
dephase_z = 0.0
period_z = 0.0
amplitude_z = 0.0
# Create a list of aeroelastic WingCrossSectionMovements for the main Wing.
main_wing_cross_section_movements_list = []
# Define the aeroelastic movement for the main Wing's WingCrossSections. Each
# WingCrossSection has its own AeroelasticWingCrossSectionMovement, which allows the
# solver to apply deformation angles at each time step based on the aerodynamic loads.
for i in range(len(example_airplane.wings[0].wing_cross_sections)):
if i == 0:
wing_cross_section_movement = ps.movements.aeroelastic_wing_cross_section_movement.AeroelasticWingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[0].wing_cross_sections[i],
)
main_wing_cross_section_movements_list.append(wing_cross_section_movement)
else:
wing_cross_section_movement = ps.movements.aeroelastic_wing_cross_section_movement.AeroelasticWingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[0].wing_cross_sections[i],
ampLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
periodLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
spacingLp_Wcsp_Lpp=("sine", "sine", "sine"),
phaseLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
ampAngles_Wcsp_to_Wcs_ixyz=(amplitude_x, amplitude_y, amplitude_z),
periodAngles_Wcsp_to_Wcs_ixyz=(period_x, period_y, period_z),
spacingAngles_Wcsp_to_Wcs_ixyz=("sine", "sine", "sine"),
phaseAngles_Wcsp_to_Wcs_ixyz=(dephase_x, dephase_y, dephase_z),
)
main_wing_cross_section_movements_list.append(wing_cross_section_movement)
# Create a list of standard (non-aeroelastic) WingCrossSectionMovements for the
# reflected Wing. The reflected Wing follows the prescribed flapping motion rigidly,
# without any structural deformation.
reflected_wing_cross_section_movements_list = []
for i in range(len(example_airplane.wings[1].wing_cross_sections)):
if i == 0:
reflected_wing_cross_section_movement = (
ps.movements.wing_cross_section_movement.WingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[1].wing_cross_sections[
i
],
ampLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
periodLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
spacingLp_Wcsp_Lpp=("sine", "sine", "sine"),
phaseLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
ampAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
periodAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
spacingAngles_Wcsp_to_Wcs_ixyz=("sine", "sine", "sine"),
phaseAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
)
)
else:
reflected_wing_cross_section_movement = (
ps.movements.wing_cross_section_movement.WingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[1].wing_cross_sections[
i
],
ampLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
periodLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
spacingLp_Wcsp_Lpp=("sine", "sine", "sine"),
phaseLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
ampAngles_Wcsp_to_Wcs_ixyz=(amplitude_x, amplitude_y, amplitude_z),
periodAngles_Wcsp_to_Wcs_ixyz=(period_x, period_y, period_z),
spacingAngles_Wcsp_to_Wcs_ixyz=("sine", "sine", "sine"),
phaseAngles_Wcsp_to_Wcs_ixyz=(dephase_x, dephase_y, dephase_z),
)
)
reflected_wing_cross_section_movements_list.append(
reflected_wing_cross_section_movement
)
# Now define the V-tail's root and tip WingCrossSections' WingCrossSectionMovements. The
# V-tail is not an aeroelastic surface, so we use standard WingCrossSectionMovements and
# a standard WingMovement. This keeps the V-tail mesh consistent across all time steps
# without applying any structural deformation.
v_tail_root_wing_cross_section_movement = (
ps.movements.wing_cross_section_movement.WingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[2].wing_cross_sections[0],
ampLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
periodLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
spacingLp_Wcsp_Lpp=("sine", "sine", "sine"),
phaseLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
ampAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
periodAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
spacingAngles_Wcsp_to_Wcs_ixyz=("sine", "sine", "sine"),
phaseAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
)
)
v_tail_tip_wing_cross_section_movement = (
ps.movements.wing_cross_section_movement.WingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[2].wing_cross_sections[1],
ampLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
periodLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
spacingLp_Wcsp_Lpp=("sine", "sine", "sine"),
phaseLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
ampAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
periodAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
spacingAngles_Wcsp_to_Wcs_ixyz=("sine", "sine", "sine"),
phaseAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
)
)
# Reflected V-tail WingCrossSectionMovements reuse the same static motion as the
# original V-tail. Both halves are symmetric and neither deforms.
# This dephase parameter is used to make the Wing start in a flat position.
dephase = 169.0
# Now define the main Wing's AeroelasticWingMovement, the reflected main Wing's standard
# WingMovement (no aeroelastic deformation), and the V-tail's WingMovement.
main_wing_movement = ps.movements.aeroelastic_wing_movement.AeroelasticWingMovement(
base_wing=example_airplane.wings[0],
wing_cross_section_movements=main_wing_cross_section_movements_list,
ampLer_Gs_Cgs=(0.0, 0.0, 0.0),
periodLer_Gs_Cgs=(0.0, 0.0, 0.0),
spacingLer_Gs_Cgs=("sine", "sine", "sine"),
phaseLer_Gs_Cgs=(0.0, 0.0, 0.0),
ampAngles_Gs_to_Wn_ixyz=(15.0, 0.0, 0.0),
periodAngles_Gs_to_Wn_ixyz=(1.0, 0.0, 0.0),
spacingAngles_Gs_to_Wn_ixyz=("sine", "sine", "sine"),
phaseAngles_Gs_to_Wn_ixyz=(dephase, 0.0, 0.0),
)
# The reflected Wing uses a standard WingMovement so it follows the same prescribed
# flapping motion as the main Wing but receives no structural deformation from the
# aeroelastic solver.
reflected_main_wing_movement = ps.movements.wing_movement.WingMovement(
base_wing=example_airplane.wings[1],
wing_cross_section_movements=reflected_wing_cross_section_movements_list,
ampLer_Gs_Cgs=(0.0, 0.0, 0.0),
periodLer_Gs_Cgs=(0.0, 0.0, 0.0),
spacingLer_Gs_Cgs=("sine", "sine", "sine"),
phaseLer_Gs_Cgs=(0.0, 0.0, 0.0),
ampAngles_Gs_to_Wn_ixyz=(15.0, 0.0, 0.0),
periodAngles_Gs_to_Wn_ixyz=(1.0, 0.0, 0.0),
spacingAngles_Gs_to_Wn_ixyz=("sine", "sine", "sine"),
phaseAngles_Gs_to_Wn_ixyz=(dephase, 0.0, 0.0),
)
v_tail_wing_movement = ps.movements.wing_movement.WingMovement(
base_wing=example_airplane.wings[2],
wing_cross_section_movements=[
v_tail_root_wing_cross_section_movement,
v_tail_tip_wing_cross_section_movement,
],
ampLer_Gs_Cgs=(0.0, 0.0, 0.0),
periodLer_Gs_Cgs=(0.0, 0.0, 0.0),
spacingLer_Gs_Cgs=("sine", "sine", "sine"),
phaseLer_Gs_Cgs=(0.0, 0.0, 0.0),
ampAngles_Gs_to_Wn_ixyz=(0.0, 0.0, 0.0),
periodAngles_Gs_to_Wn_ixyz=(0.0, 0.0, 0.0),
spacingAngles_Gs_to_Wn_ixyz=("sine", "sine", "sine"),
phaseAngles_Gs_to_Wn_ixyz=(0.0, 0.0, 0.0),
)
# Delete the extraneous pointers to the WingCrossSectionMovements, as these are now
# contained within the WingMovements. This is optional, but it can make debugging
# easier.
del v_tail_root_wing_cross_section_movement
del v_tail_tip_wing_cross_section_movement
# Now define the example Airplane's AeroelasticAirplaneMovement.
example_airplane_movement = (
ps.movements.aeroelastic_airplane_movement.AeroelasticAirplaneMovement(
base_airplane=example_airplane,
wing_movements=[
main_wing_movement,
reflected_main_wing_movement,
v_tail_wing_movement,
],
ampCg_GP1_CgP1=(0.0, 0.0, 0.0),
periodCg_GP1_CgP1=(0.0, 0.0, 0.0),
spacingCg_GP1_CgP1=("sine", "sine", "sine"),
phaseCg_GP1_CgP1=(0.0, 0.0, 0.0),
)
)
del main_wing_movement
del reflected_main_wing_movement
del v_tail_wing_movement
# Define a new OperatingPoint.
example_operating_point = ps.operating_point.OperatingPoint(
rho=1.225, vCg__E=10.0, alpha=0.0, beta=0.0, externalFX_W=0.0, nu=15.06e-6
)
# Define the OperatingPoint's OperatingPointMovement.
example_operating_point_movement = (
ps.movements.operating_point_movement.OperatingPointMovement(
base_operating_point=example_operating_point,
ampVCg__E=0.0,
periodVCg__E=0.0,
spacingVCg__E="sine",
)
)
# Delete the extraneous pointer.
del example_operating_point
# Define the AeroelasticMovement. This contains the AeroelasticAirplaneMovement and the
# OperatingPointMovement. The delta_time and num_steps must be specified explicitly.
# With a flapping period of 1.0 s, 3 cycles at dt = 0.03 s gives 100 steps.
example_movement = ps.movements.aeroelastic_movement.AeroelasticMovement(
airplane_movements=[example_airplane_movement],
operating_point_movement=example_operating_point_movement,
delta_time=0.03,
num_steps=100,
)
# Define the AeroelasticUnsteadyProblem. The deformation parameters are set here. The
# wing_density, spring_constant_rad, and damping_constant_rad are the primary parameters
# you should expect to change. The step_discards parameter is more for managing the UVLM
# solver's inconsistent startup effects.
example_problem = ps.problems.AeroelasticUnsteadyProblem(
movement=example_movement,
wing_density=6.0,
spring_constant_rad=1000.0,
damping_constant_rad=1000.0,
step_discards=5,
)
# Define a new solver. We'll create an AeroelasticUnsteadyRingVortexLatticeMethodSolver,
# which requires an AeroelasticUnsteadyProblem.
example_solver = ps.aeroelastic_unsteady_ring_vortex_lattice_method.AeroelasticUnsteadyRingVortexLatticeMethodSolver(
aeroelastic_unsteady_problem=example_problem,
)
# Delete the extraneous pointer.
del example_problem
# Run the solver.
example_solver.run(
prescribed_wake=False,
)
print("The simulation has finished.")
# Save the solved solver to a compressed JSON file. This allows us to load the results
# later without re-running the simulation. Use ".json.gz" for gzip compression, which is
# recommended over plain JSONs for all but the smallest, unmeshed geometry objects.
print("Saving the solver...")
ps.save("example_solver.json.gz", example_solver)
print("Finished saving the solver.")
# Load the saved solver. The loaded object is identical to the original and can be
# passed to any output function.
print("Loading the saved solver...")
loaded_solver = ps.load("example_solver.json.gz")
# The load function is annotated as returning object because a saved file can hold any
# Ptera Software object. This assert narrows the type for type checkers and guards
# against loading the wrong file.
assert isinstance(
loaded_solver,
ps.aeroelastic_unsteady_ring_vortex_lattice_method.AeroelasticUnsteadyRingVortexLatticeMethodSolver,
)
print("Finished loading the saved solver.")
# Call the animate function on the loaded solver. This produces a GIF of the wake being
# shed. The GIF is saved in the same directory as this script. Press "q", after
# orienting the view, to begin the animation.
ps.output.animate(
unsteady_solver=loaded_solver,
scalar_type="lift",
show_wake_vortices=True,
save=True,
)