"""Demonstrates running Ptera Software's
AeroelasticUnsteadyRingVortexLatticeMethodSolver with a flapping-wing airplane whose
main wing deforms under its own aerodynamic loads."""
# First, import the software's main package. Note that if you wished to import this
# software into another package, you would first install it by running "pip install
# pterasoftware" in your terminal.
import pterasoftware as ps
# Create an Airplane with our custom geometry. I am going to declare every parameter for
# Airplane, even though most of them have usable default values. This is for educational
# purposes, but keep in mind that it makes the code much longer than it needs to be. For
# details about each parameter, read the detailed class docstring. The same caveats
# apply to the other classes, methods, and functions I call in this script.
# Initialize the WingCrossSection parameters. Define the offsets for the spacing.
num_spanwise_panels = 2
Lp_Wcsp_Lpp_Offsets = (0.1, 0.5, 0.0)
cross_section_chords = [1.75, 1.75, 1.75, 1.75, 1.65, 1.55, 1.4, 1.2, 1.0]
wing_cross_sections = []
# Define WingCrossSections with a variable set of chords. All WingCrossSections for the
# deformation simulation have num_spanwise_panels = 2 (except the wing tip, which is
# always None). This is because each strip of WingCrossSection deforms independently as
# a torsional spring, and that model only works well if the strips are thin. To go
# thinner for the same base definition, increase the number of spanwise panels and set
# the explode_into_strips parameter to True on the Wing, which splits it back into
# single strips for deformation.
for i in range(len(cross_section_chords)):
wing_cross_sections.append(
ps.geometry.wing_cross_section.WingCrossSection(
num_spanwise_panels=(
num_spanwise_panels if i < len(cross_section_chords) - 1 else None
),
chord=cross_section_chords[i],
Lp_Wcsp_Lpp=Lp_Wcsp_Lpp_Offsets if i > 0 else (0.0, 0.0, 0.0),
angles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
control_surface_symmetry_type="symmetric",
control_surface_hinge_point=0.75,
control_surface_deflection=0.0,
spanwise_spacing="uniform" if i < len(cross_section_chords) - 1 else None,
airfoil=ps.geometry.airfoil.Airfoil(
name="naca2412",
outline_A_Lp=None,
resample=True,
n_points_per_side=400,
),
)
)
# Define the primary Wing. Note that the explode_into_strips parameter is set to True,
# which means that the Wing will be split into strips for deformation, and each strip
# will be modeled as a torsional spring.
wing_1 = ps.geometry.wing.Wing(
wing_cross_sections=wing_cross_sections,
name="Main Wing",
Ler_Gs_Cgs=(0.0, 0.5, 0.0),
angles_Gs_to_Wn_ixyz=(0.0, 0.0, 0.0),
symmetric=True,
mirror_only=False,
symmetryNormal_G=(0.0, 1.0, 0.0),
symmetryPoint_G_Cg=(0.0, 0.0, 0.0),
explode_into_strips=True,
num_chordwise_panels=6,
chordwise_spacing="uniform",
)
# Actually generate the Airplane. The V-tail is added as a second lifting surface but is
# not split into deformation strips, because it follows prescribed rigid motion rather
# than deforming. The solver deforms each Wing from its own aerodynamic loads, but only
# Wings backed by an AeroelasticWingMovement. The V-tail uses a standard WingMovement
# and stays rigid. Leaving the tail rigid also keeps its movement definition simpler,
# since it then needs no per-strip WingCrossSections.
example_airplane = ps.geometry.airplane.Airplane(
wings=[
wing_1,
ps.geometry.wing.Wing(
wing_cross_sections=[
ps.geometry.wing_cross_section.WingCrossSection(
num_spanwise_panels=8,
chord=1.5,
Lp_Wcsp_Lpp=(0.0, 0.0, 0.0),
angles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
control_surface_symmetry_type="symmetric",
control_surface_hinge_point=0.75,
control_surface_deflection=0.0,
spanwise_spacing="uniform",
airfoil=ps.geometry.airfoil.Airfoil(
name="naca0012",
outline_A_Lp=None,
resample=True,
n_points_per_side=400,
),
),
ps.geometry.wing_cross_section.WingCrossSection(
num_spanwise_panels=None,
chord=1.0,
Lp_Wcsp_Lpp=(0.5, 2.0, 0.0),
angles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
control_surface_symmetry_type="symmetric",
control_surface_hinge_point=0.75,
control_surface_deflection=0.0,
spanwise_spacing=None,
airfoil=ps.geometry.airfoil.Airfoil(
name="naca0012",
outline_A_Lp=None,
resample=True,
n_points_per_side=400,
),
),
],
name="V-Tail",
Ler_Gs_Cgs=(5.0, 0.0, 0.0),
angles_Gs_to_Wn_ixyz=(0.0, -5.0, 0.0),
symmetric=True,
mirror_only=False,
symmetryNormal_G=(0.0, 1.0, 0.0),
symmetryPoint_G_Cg=(0.0, 0.0, 0.0),
explode_into_strips=False,
num_chordwise_panels=6,
chordwise_spacing="uniform",
),
],
name="Example Airplane",
Cg_GP1_CgP1=(0.0, 0.0, 0.0),
weight=0.0,
c_ref=None,
b_ref=None,
)
# The main Wing was defined to have symmetric = True, mirror_only = False, and with a
# symmetry plane offset non-coincident with the Wing's axes yz plane. Therefore, that
# Wing had type 5 symmetry (see the Wing class documentation for more details on
# symmetry types). Therefore, it was actually split into two Wings, with the second Wing
# being a reflected version of the first. Therefore, we need to define a WingMovement
# for this reflected Wing. To start, we'll first define the reflected main Wing's root
# and tip WingCrossSections' WingCrossSectionMovements.
# Define the WingCrossSectionMovement parameters.
dephase_x = 0.0
period_x = 0.0
amplitude_x = 0.0
dephase_y = 0.0
period_y = 0.0
amplitude_y = 0.0
dephase_z = 0.0
period_z = 0.0
amplitude_z = 0.0
# Create a list of WingCrossSectionMovements for the main Wing.
main_wing_cross_section_movements_list = []
# Create a list of WingCrossSectionMovements for the reflected Wing.
reflected_wing_cross_section_movements_list = []
# Define the movement for the main Wing and its reflected counterpart's
# WingCrossSections. Each WingCrossSection has its own
# AeroelasticWingCrossSectionMovement, which allows the solver to apply deformation
# angles at each time step based on the aerodynamic loads.
for i in range(len(example_airplane.wings[0].wing_cross_sections)):
if i == 0:
wing_cross_section_movement = ps.movements.aeroelastic_wing_cross_section_movement.AeroelasticWingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[0].wing_cross_sections[i],
)
main_wing_cross_section_movements_list.append(wing_cross_section_movement)
reflected_wing_cross_section_movements_list.append(wing_cross_section_movement)
else:
wing_cross_section_movement = ps.movements.aeroelastic_wing_cross_section_movement.AeroelasticWingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[0].wing_cross_sections[i],
ampLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
periodLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
spacingLp_Wcsp_Lpp=("sine", "sine", "sine"),
phaseLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
ampAngles_Wcsp_to_Wcs_ixyz=(amplitude_x, amplitude_y, amplitude_z),
periodAngles_Wcsp_to_Wcs_ixyz=(period_x, period_y, period_z),
spacingAngles_Wcsp_to_Wcs_ixyz=("sine", "sine", "sine"),
phaseAngles_Wcsp_to_Wcs_ixyz=(dephase_x, dephase_y, dephase_z),
)
main_wing_cross_section_movements_list.append(wing_cross_section_movement)
reflected_wing_cross_section_movements_list.append(wing_cross_section_movement)
# Now define the V-tail's root and tip WingCrossSections' WingCrossSectionMovements. The
# V-tail is not an aeroelastic surface, so we use standard WingCrossSectionMovements and
# a standard WingMovement. This keeps the V-tail mesh consistent across all time steps
# without applying any structural deformation.
v_tail_root_wing_cross_section_movement = (
ps.movements.wing_cross_section_movement.WingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[2].wing_cross_sections[0],
ampLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
periodLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
spacingLp_Wcsp_Lpp=("sine", "sine", "sine"),
phaseLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
ampAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
periodAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
spacingAngles_Wcsp_to_Wcs_ixyz=("sine", "sine", "sine"),
phaseAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
)
)
v_tail_tip_wing_cross_section_movement = (
ps.movements.wing_cross_section_movement.WingCrossSectionMovement(
base_wing_cross_section=example_airplane.wings[2].wing_cross_sections[1],
ampLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
periodLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
spacingLp_Wcsp_Lpp=("sine", "sine", "sine"),
phaseLp_Wcsp_Lpp=(0.0, 0.0, 0.0),
ampAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
periodAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
spacingAngles_Wcsp_to_Wcs_ixyz=("sine", "sine", "sine"),
phaseAngles_Wcsp_to_Wcs_ixyz=(0.0, 0.0, 0.0),
)
)
# Reflected V-tail WingCrossSectionMovements reuse the same static motion as the
# original V-tail. Both halves are symmetric and neither deforms.
# This dephase parameter is used to make the Wing start in a flat position.
dephase = 169.0
# Now define the main Wing's AeroelasticWingMovement, the reflected main Wing's
# AeroelasticWingMovement, and the V-tail's AeroelasticWingMovement.
main_wing_movement = ps.movements.aeroelastic_wing_movement.AeroelasticWingMovement(
base_wing=example_airplane.wings[0],
wing_cross_section_movements=main_wing_cross_section_movements_list,
ampLer_Gs_Cgs=(0.0, 0.0, 0.0),
periodLer_Gs_Cgs=(0.0, 0.0, 0.0),
spacingLer_Gs_Cgs=("sine", "sine", "sine"),
phaseLer_Gs_Cgs=(0.0, 0.0, 0.0),
ampAngles_Gs_to_Wn_ixyz=(15.0, 0.0, 0.0),
periodAngles_Gs_to_Wn_ixyz=(1.0, 0.0, 0.0),
spacingAngles_Gs_to_Wn_ixyz=("sine", "sine", "sine"),
phaseAngles_Gs_to_Wn_ixyz=(dephase, 0.0, 0.0),
)
reflected_main_wing_movement = (
ps.movements.aeroelastic_wing_movement.AeroelasticWingMovement(
base_wing=example_airplane.wings[1],
wing_cross_section_movements=reflected_wing_cross_section_movements_list,
ampLer_Gs_Cgs=(0.0, 0.0, 0.0),
periodLer_Gs_Cgs=(0.0, 0.0, 0.0),
spacingLer_Gs_Cgs=("sine", "sine", "sine"),
phaseLer_Gs_Cgs=(0.0, 0.0, 0.0),
ampAngles_Gs_to_Wn_ixyz=(15.0, 0.0, 0.0),
periodAngles_Gs_to_Wn_ixyz=(1.0, 0.0, 0.0),
spacingAngles_Gs_to_Wn_ixyz=("sine", "sine", "sine"),
phaseAngles_Gs_to_Wn_ixyz=(dephase, 0.0, 0.0),
)
)
v_tail_wing_movement = ps.movements.wing_movement.WingMovement(
base_wing=example_airplane.wings[2],
wing_cross_section_movements=[
v_tail_root_wing_cross_section_movement,
v_tail_tip_wing_cross_section_movement,
],
ampLer_Gs_Cgs=(0.0, 0.0, 0.0),
periodLer_Gs_Cgs=(0.0, 0.0, 0.0),
spacingLer_Gs_Cgs=("sine", "sine", "sine"),
phaseLer_Gs_Cgs=(0.0, 0.0, 0.0),
ampAngles_Gs_to_Wn_ixyz=(0.0, 0.0, 0.0),
periodAngles_Gs_to_Wn_ixyz=(0.0, 0.0, 0.0),
spacingAngles_Gs_to_Wn_ixyz=("sine", "sine", "sine"),
phaseAngles_Gs_to_Wn_ixyz=(0.0, 0.0, 0.0),
)
# Delete the extraneous pointers to the WingCrossSectionMovements, as these are now
# contained within the WingMovements. This is optional, but it can make debugging
# easier.
del v_tail_root_wing_cross_section_movement
del v_tail_tip_wing_cross_section_movement
# Now define the example Airplane's AeroelasticAirplaneMovement.
example_airplane_movement = (
ps.movements.aeroelastic_airplane_movement.AeroelasticAirplaneMovement(
base_airplane=example_airplane,
wing_movements=[
main_wing_movement,
reflected_main_wing_movement,
v_tail_wing_movement,
],
ampCg_GP1_CgP1=(0.0, 0.0, 0.0),
periodCg_GP1_CgP1=(0.0, 0.0, 0.0),
spacingCg_GP1_CgP1=("sine", "sine", "sine"),
phaseCg_GP1_CgP1=(0.0, 0.0, 0.0),
)
)
del main_wing_movement
del reflected_main_wing_movement
del v_tail_wing_movement
# Define a new OperatingPoint.
example_operating_point = ps.operating_point.OperatingPoint(
rho=1.225, vCg__E=10.0, alpha=0.0, beta=0.0, externalFX_W=0.0, nu=15.06e-6
)
# Define the OperatingPoint's OperatingPointMovement.
example_operating_point_movement = (
ps.movements.operating_point_movement.OperatingPointMovement(
base_operating_point=example_operating_point,
ampVCg__E=0.0,
periodVCg__E=0.0,
spacingVCg__E="sine",
)
)
# Delete the extraneous pointer.
del example_operating_point
# Define the AeroelasticMovement. This contains the AeroelasticAirplaneMovement and the
# OperatingPointMovement. The delta_time and num_steps must be specified explicitly.
# With a flapping period of 1.0 s, 3 cycles at dt = 0.03 s gives 100 steps.
example_movement = ps.movements.aeroelastic_movement.AeroelasticMovement(
airplane_movements=[example_airplane_movement],
operating_point_movement=example_operating_point_movement,
delta_time=0.03,
num_steps=100,
)
# Define the AeroelasticUnsteadyProblem. The deformation parameters are set here. The
# wing_density, spring_constant_rad, and damping_constant_rad are the primary parameters
# you should expect to change. The step_discards parameter is more for managing the UVLM
# solver's inconsistent startup effects.
example_problem = ps.problems.AeroelasticUnsteadyProblem(
movement=example_movement,
wing_density=6.0,
spring_constant_rad=1000.0,
damping_constant_rad=1000.0,
step_discards=5,
)
# Define a new solver. We'll create an AeroelasticUnsteadyRingVortexLatticeMethodSolver,
# which requires an AeroelasticUnsteadyProblem.
example_solver = ps.aeroelastic_unsteady_ring_vortex_lattice_method.AeroelasticUnsteadyRingVortexLatticeMethodSolver(
aeroelastic_unsteady_problem=example_problem,
)
# Delete the extraneous pointer.
del example_problem
# Run the solver.
example_solver.run(
prescribed_wake=False,
)
print("The simulation has finished.")
# Save the solved solver to a compressed JSON file. This allows us to load the results
# later without re-running the simulation. Use ".json.gz" for gzip compression, which is
# recommended over plain JSONs for all but the smallest, unmeshed geometry objects.
print("Saving the solver...")
ps.save("example_solver.json.gz", example_solver)
print("Finished saving the solver.")
# Load the saved solver. The loaded object is identical to the original and can be
# passed to any output function.
print("Loading the saved solver...")
loaded_solver = ps.load("example_solver.json.gz")
# The load function is annotated as returning object because a saved file can hold any
# Ptera Software object. This assert narrows the type for type checkers and guards
# against loading the wrong file.
assert isinstance(
loaded_solver,
ps.aeroelastic_unsteady_ring_vortex_lattice_method.AeroelasticUnsteadyRingVortexLatticeMethodSolver,
)
print("Finished loading the saved solver.")
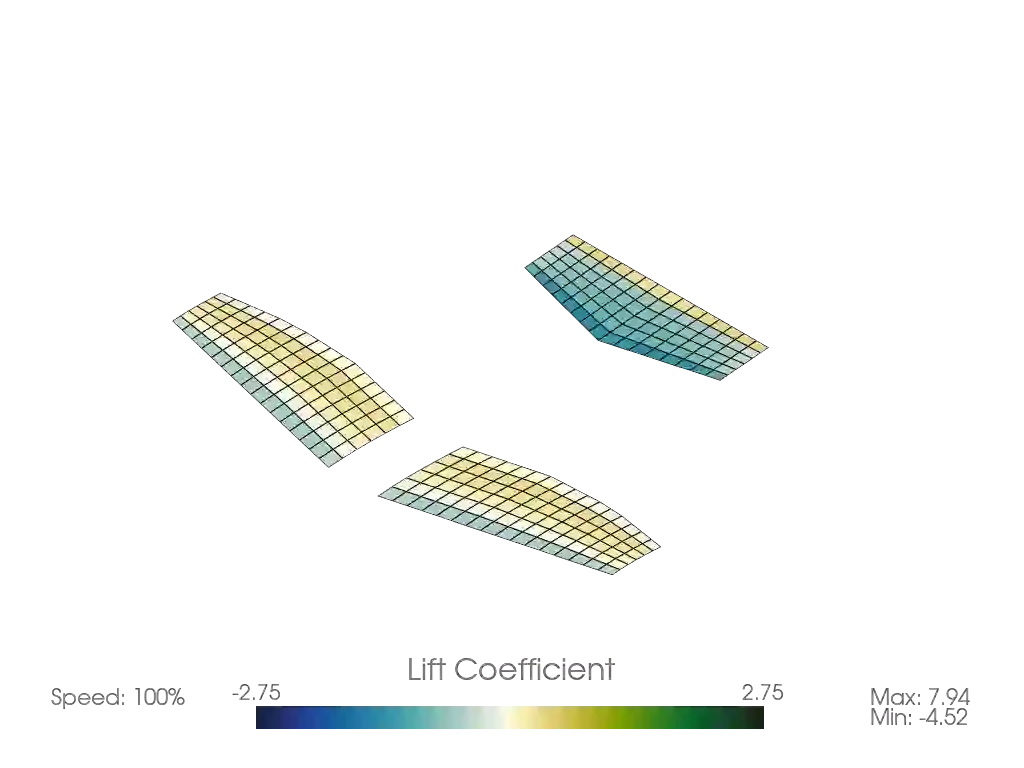
# Call the animate function on the loaded solver. This produces a GIF of the wake being
# shed. The GIF is saved in the same directory as this script. Press "q", after
# orienting the view, to begin the animation.
ps.output.animate(
unsteady_solver=loaded_solver,
scalar_type="lift",
show_wake_vortices=True,
save=True,
)